Research
Manipulation, bipedal walking, model predictive control, feedback control, nonprehensile manipulation…
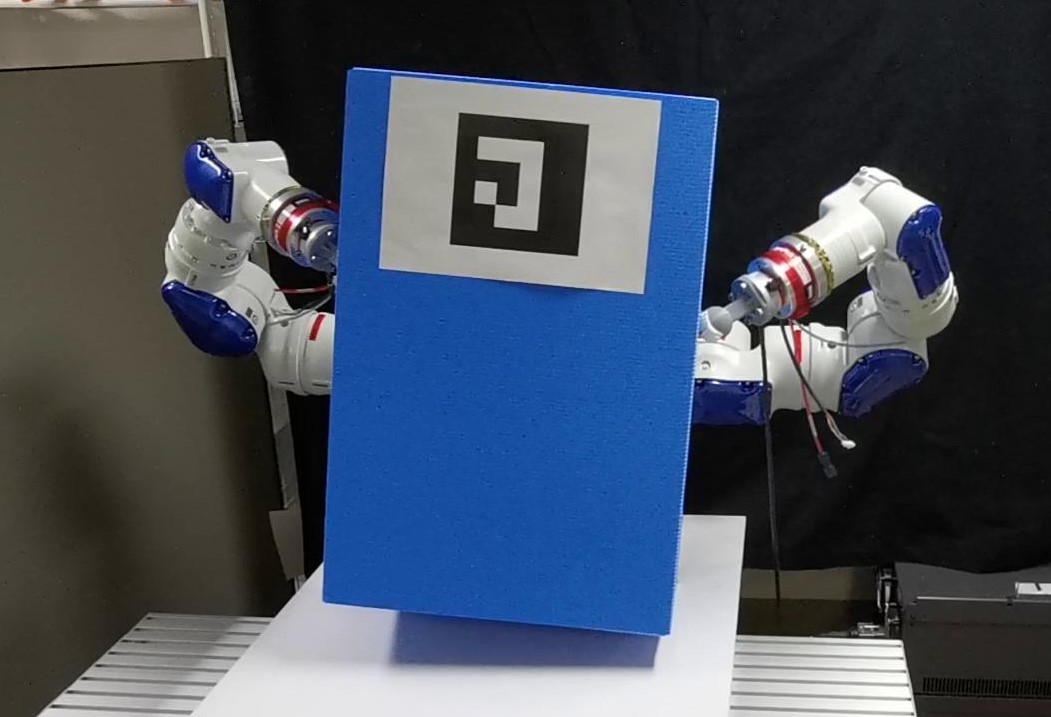
Pivoting Manipulation
A large box is manipulated by Yaskawa Robot.
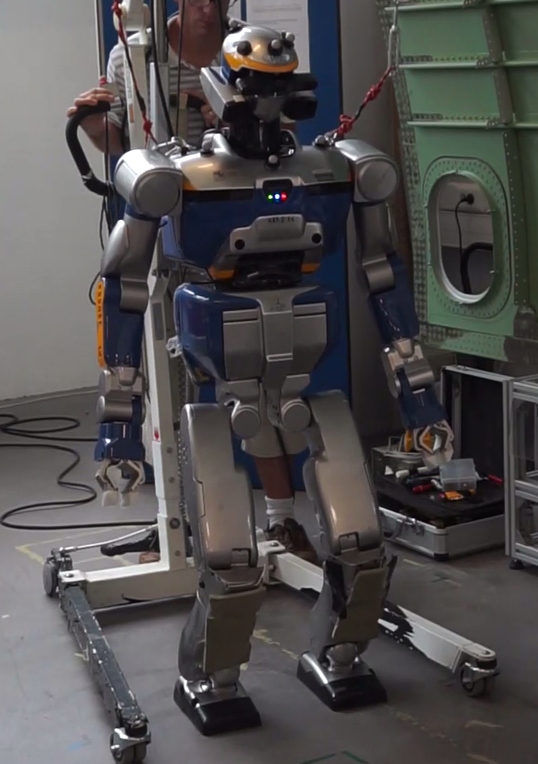
Bipedal Walking
Humanoid robot HRP-2

Pulling Fire Hose
By humanoid robot Talos
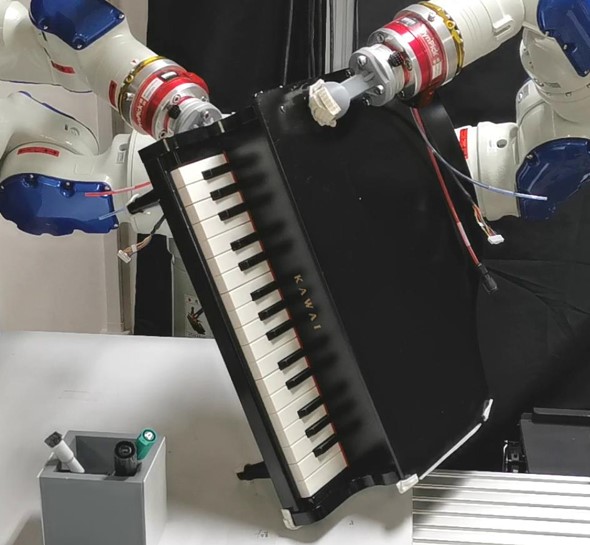
Manipulation combining Pivoting, Tumbling and Regrasping
By industrial robot SDA5F